2、内存管理
点击阅读更多查看文章内容
虚拟内存
单片机的 CPU 是直接操作内存的「物理地址」。在这种情况下,要想在内存中同时运行两个程序是不可能的。如果第一个程序在 2000 的位置写入一个新的值,将会擦掉第二个程序存放在相同位置上的所有内容,所以同时运行两个程序是根本行不通的,这两个程序会立刻崩溃。
我们可以把进程所使用的地址「隔离」开来,即让操作系统为每个进程分配独立的一套「虚拟地址」,互不干涉。但是有个前提每个进程都不能访问物理地址,至于虚拟地址最终怎么落到物理内存里,对进程来说是透明的。
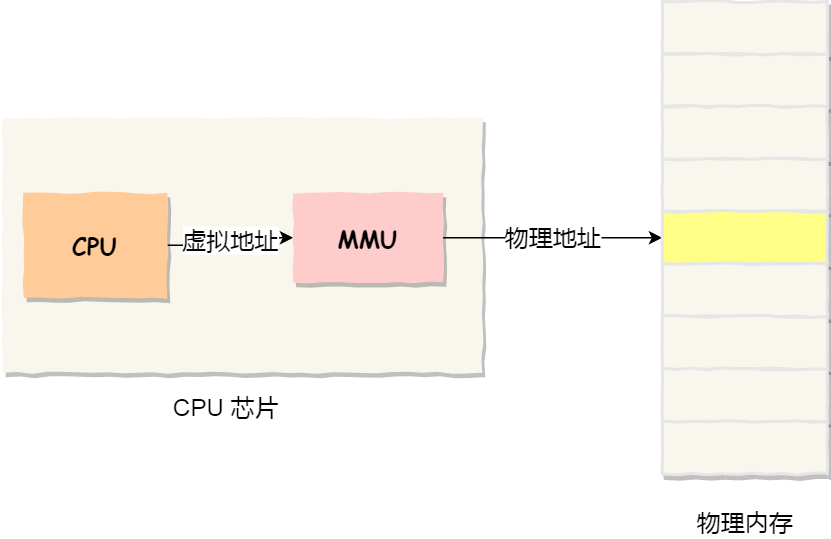
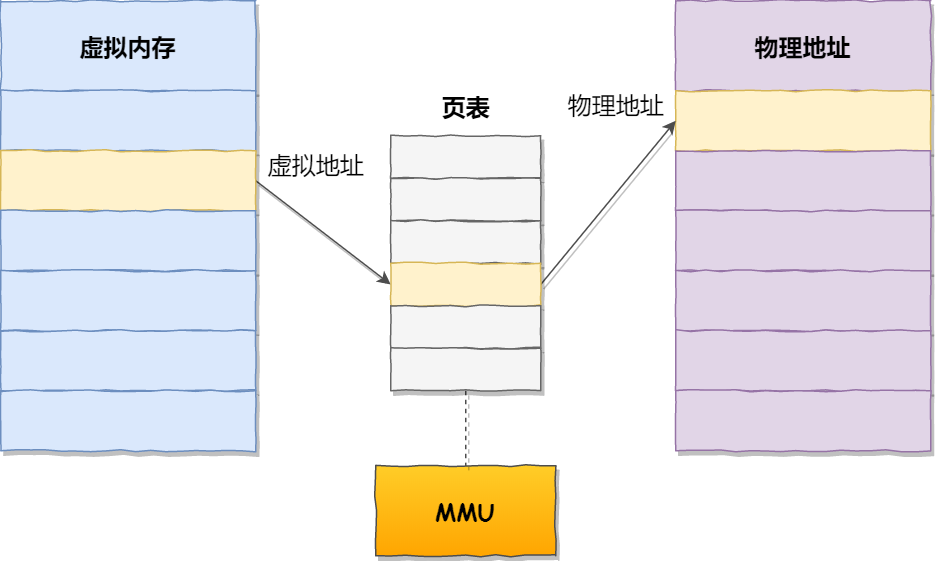
我们程序所使用的内存地址叫做虚拟内存地址(Virtual Memory Address)
实际存在硬件里面的空间地址叫物理内存地址(Physical Memory Address)
进程持有的虚拟地址会通过 CPU 芯片中的内存管理单元(MMU)的映射关系,来转换变成物理地址,然后再通过物理地址访问内存,如下图所示:
操作系统是如何管理虚拟地址与物理地址之间的关系?主要有两种方式,分别是内存分段和内存分页
内存分段
程序是由若干个逻辑分段组成的,如可由代码分段、数据分段、栈段、堆段组成。不同的段是有不同的属性的,所以就用分段(Segmentation)的形式把这些段分离出来。
好处:
- 内存布局更直观。
- 方便数据共享
- 段大小可按需扩展
分段机制下的虚拟地址由两部分组成,段选择因子和段内偏移量。
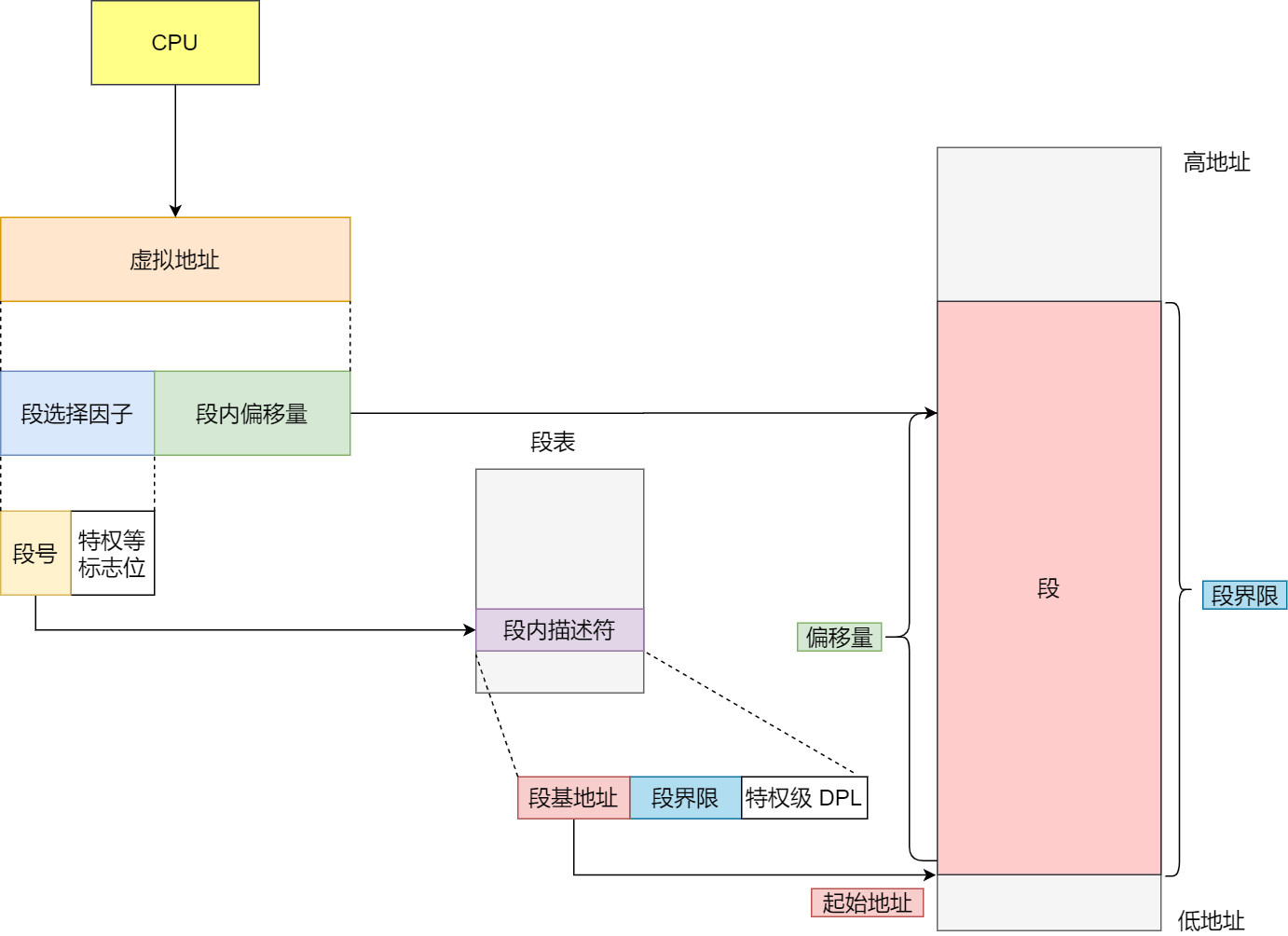
- 段选择因子就保存在段寄存器里面。段选择因子里面最重要的是段号,用作段表的索引。段表里面保存的是这个段的基地址、段的界限和特权等级等。
- 虚拟地址中的段内偏移量应该位于 0 和段界限之间,如果段内偏移量是合法的,就将段基地址加上段内偏移量得到物理内存地址。
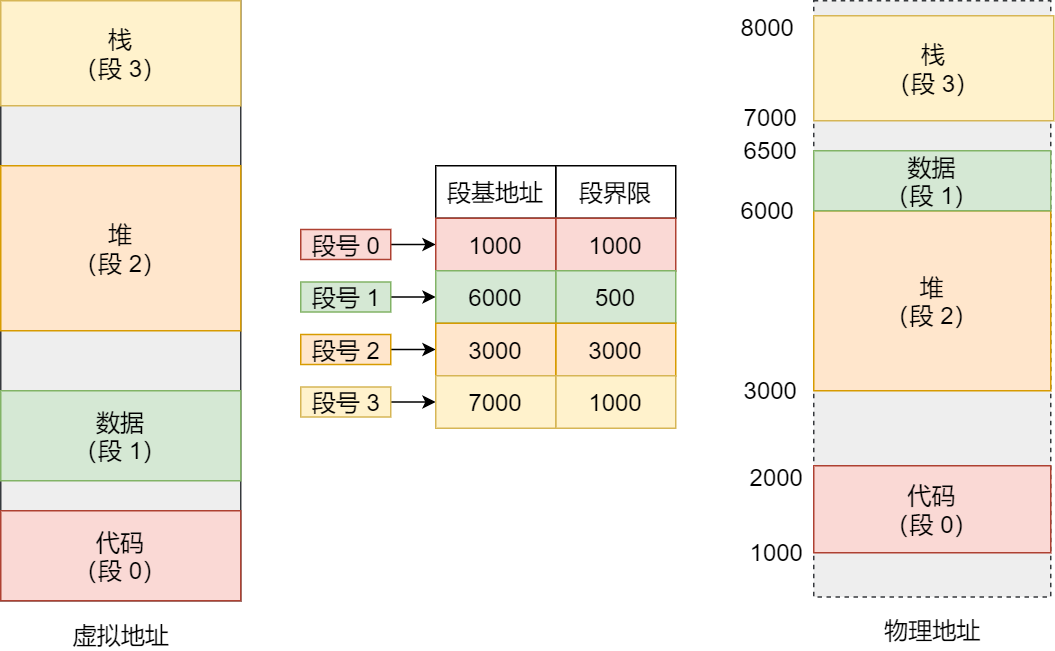
段表:分段机制会把程序的虚拟地址分成 4 个段,每个段在段表中有一个项,在这一项找到段的基地址,再加上偏移量,于是就能找到物理内存中的地址,如下图:如果要访问段 3 中偏移量 500 的虚拟地址,我们可以计算出物理地址为,段 3 基地址 7000 + 偏移量 500 = 7500。
分段存在两个问题:
- 第一个就是内存碎片的问题。
- 第二个就是内存交换的效率低的问题。
我们来看看这样一个例子。假设有 1G 的物理内存,用户执行了多个程序,其中: 游戏占用了 512MB 内存 浏览器占用了 128MB 内存 音乐占用了 256 MB 内存。 这个时候,如果我们关闭了浏览器,则空闲内存还有 1024 - 512 - 256 = 256MB。 如果这个 256MB 不是连续的,被分成了两段 128 MB 内存,这就会导致没有空间再打开一个 200MB 的程序。
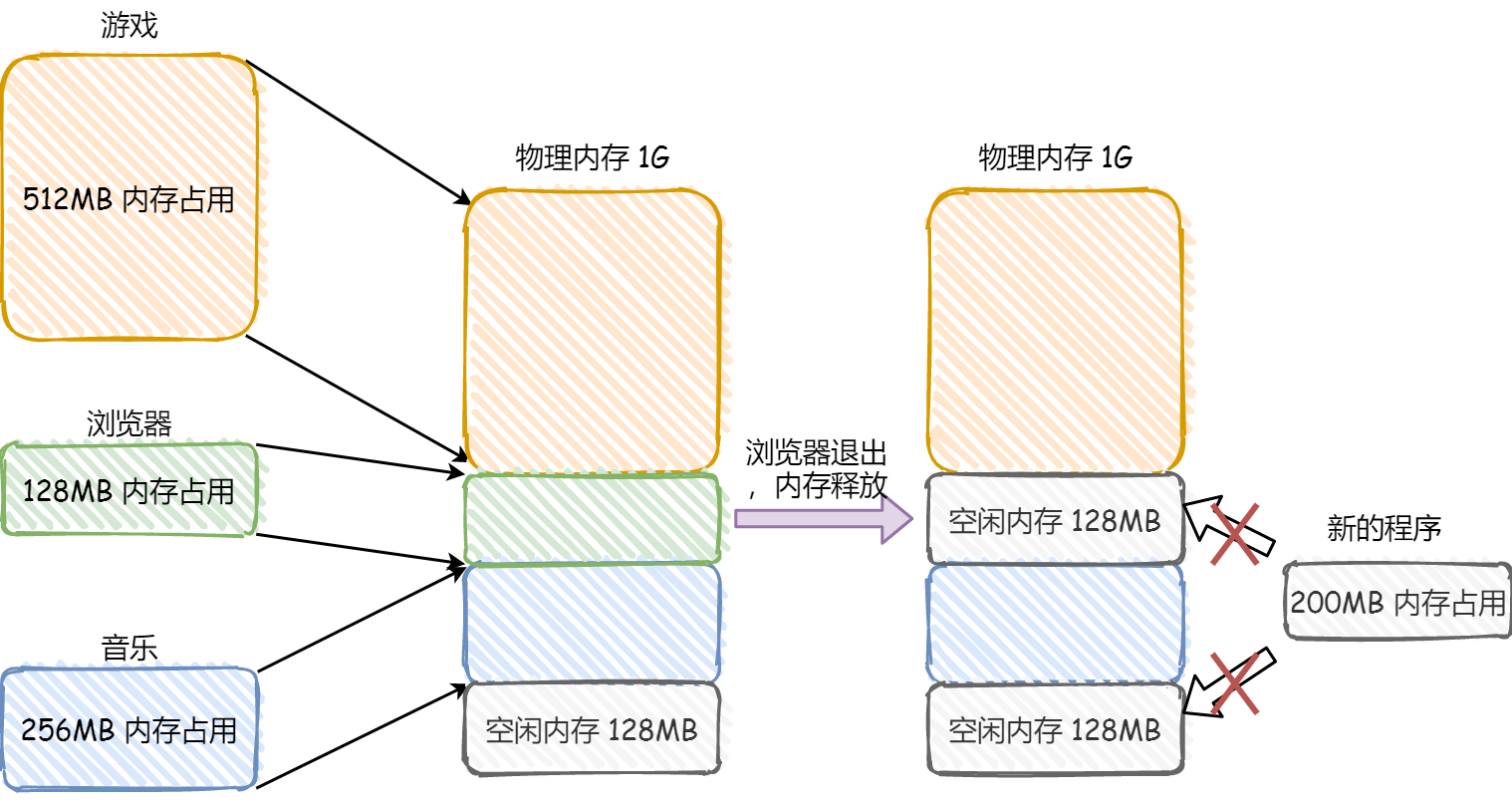
内存分段管理可以做到段根据实际需求分配内存,所以有多少需求就分配多大的段,所以不会出现内部内存碎片。 但是由于每个段的长度不固定,所以多个段未必能恰好使用所有的内存空间,会产生了多个不连续的小物理内存,导致新的程序无法被装载,所以会出现外部内存碎片的问题。
解决「外部内存碎片」的问题就是内存交换。 可以把音乐程序占用的那 256MB 内存写到硬盘上,然后再从硬盘上读回来到内存里。不过再读回的时候,我们不能装载回原来的位置,而是紧紧跟着那已经被占用了的 512MB 内存后面。这样就能空缺出连续的 256MB 空间,于是新的 200MB 程序就可以装载进来。 这个内存交换空间,在 Linux 系统里,也就是我们常看到的 Swap 空间,这块空间是从硬盘划分出来的,用于内存与硬盘的空间交换。
为什么效率低?
对于多进程的系统来说,用分段的方式,外部内存碎片是很容易产生的,产生了外部内存碎片,那不得不重新 Swap 内存区域,这个过程会产生性能瓶颈。 因为硬盘的访问速度要比内存慢太多了,每一次内存交换,我们都需要把一大段连续的内存数据写到硬盘上。 所以,如果内存交换的时候,交换的是一个占内存空间很大的程序,这样整个机器都会显得卡顿。 为了解决内存分段的「外部内存碎片和内存交换效率低」的问题,就出现了内存分页。
内存分页
分页是把整个虚拟和物理内存空间切成一段段固定尺寸的大小。这样一个连续并且尺寸固定的内存空间,我们叫页(Page)。在 Linux 下,每一页的大小为 4KB。
虚拟地址与物理地址之间通过页表来映射,如下图:
采用了分页,页与页之间是紧密排列的,所以不会有外部碎片。 但是,因为内存分页机制分配内存的最小单位是一页,即使程序不足一页大小,我们最少只能分配一个页,所以页内会出现内存浪费,所以针对内存分页机制会有内部内存碎片的现象。
如果内存空间不够,操作系统会把其他正在运行的进程中的「最近没被使用」的内存页面给释放掉,也就是暂时写在硬盘上,称为换出(Swap Out)。一旦需要的时候,再加载进来,称为换入(Swap In)。所以,一次性写入磁盘的也只有少数的一个页或者几个页,不会花太多时间,内存交换的效率就相对比较高。
更进一步地,分页的方式使得我们在加载程序的时候,不再需要一次性都把程序加载到物理内存中。我们完全可以在进行虚拟内存和物理内存的页之间的映射之后,并不真的把页加载到物理内存里,而是只有在程序运行中,需要用到对应虚拟内存页里面的指令和数据时,再加载到物理内存里面去。
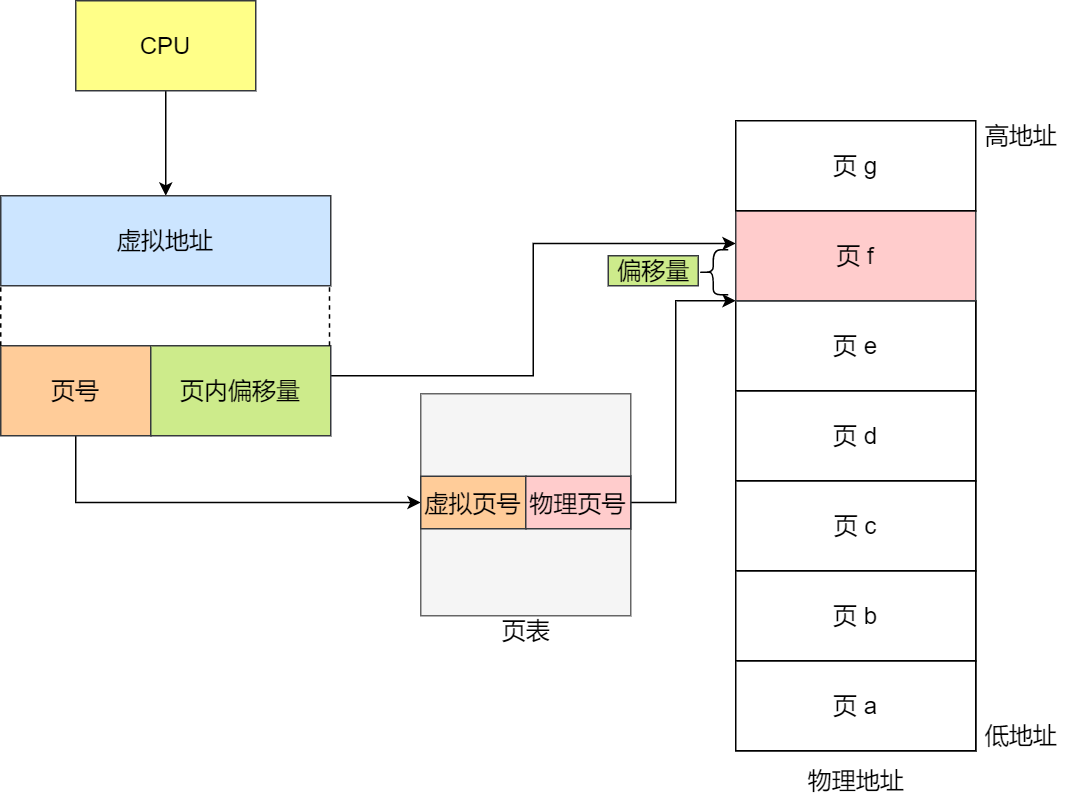
在分页机制下,虚拟地址分为两部分,页号和页内偏移。页号作为页表的索引,页表包含物理页每页所在物理内存的基地址,这个基地址与页内偏移的组合就形成了物理内存地址,见下图。
多级页表
在 32 位的环境下,虚拟地址空间共有 4GB,假设一个页的大小是 4KB(2^12),那么就需要大约 100 万 (2^20) 个页,每个「页表项」需要 4 个字节大小来存储,那么整个 4GB 空间的映射就需要有 4MB 的内存来存储页表。 这 4MB 大小的页表,看起来也不是很大。但是要知道每个进程都是有自己的虚拟地址空间的,也就说都有自己的页表。 那么,100 个进程的话,就需要 400MB 的内存来存储页表,这是非常大的内存了,更别说 64 位的环境了
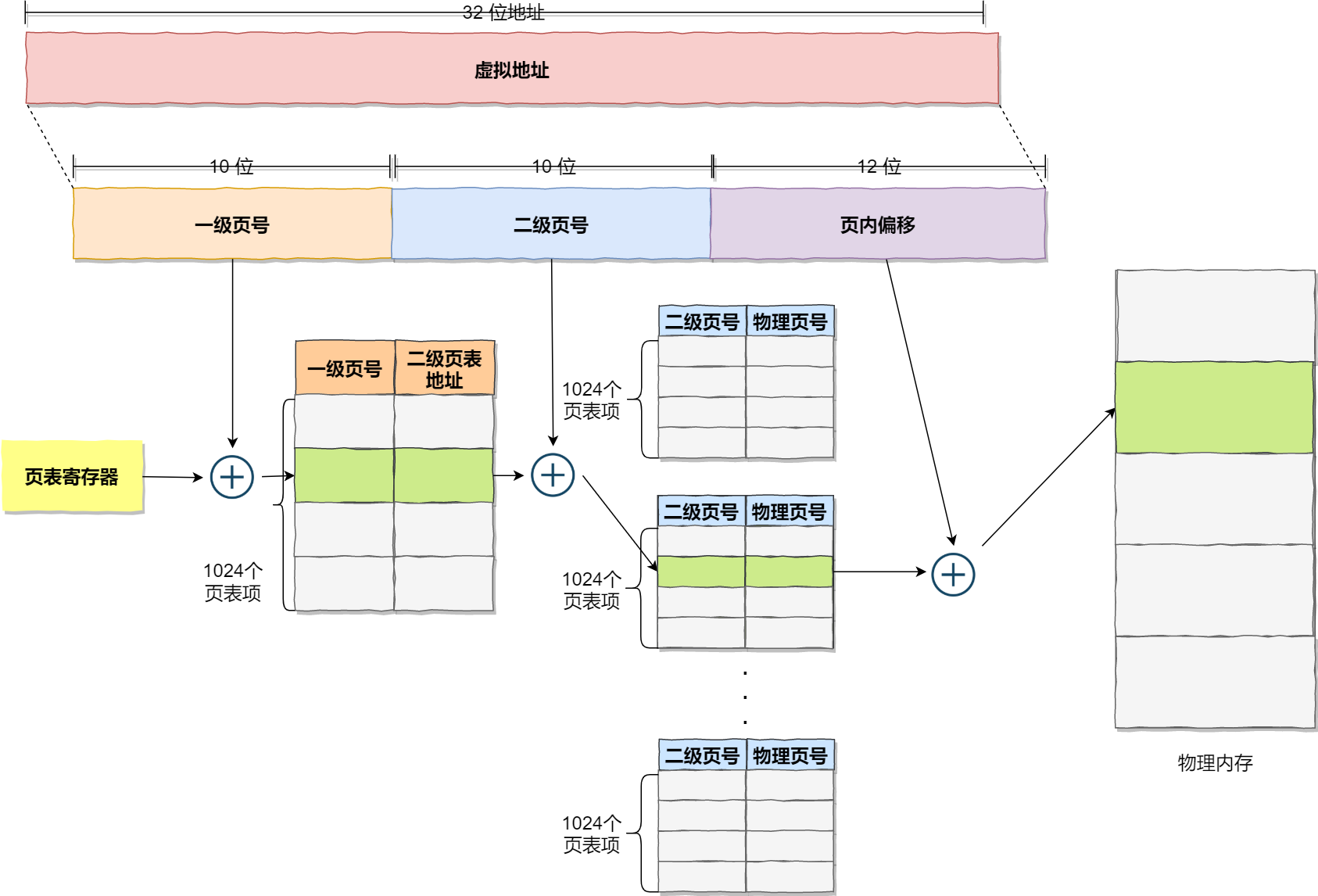
要解决上面的问题,就需要采用一种叫作多级页表(Multi-Level Page Table)的解决方案。 在前面我们知道了,对于单页表的实现方式,在 32 位和页大小 4KB 的环境下,一个进程的页表需要装下 100 多万个「页表项」,并且每个页表项是占用 4 字节大小的,于是相当于每个页表需占用 4MB 大小的空间。 我们把这个 100 多万个「页表项」的单级页表再分页,将页表(一级页表)分为 1024 个页表(二级页表),每个表(二级页表)中包含 1024 个「页表项」,形成二级分页。如下图所示:
你可能会问,分了二级表,映射 4GB 地址空间就需要 4KB(一级页表)+ 4MB(二级页表)的内存,这样占用空间不是更大了吗?
每个进程都有 4GB 的虚拟地址空间,而显然对于大多数程序来说,其使用到的空间远未达到 4GB,因为会存在部分对应的页表项都是空的,根本没有分配,对于已分配的页表项,如果存在最近一定时间未访问的页表,在物理内存紧张的情况下,操作系统会将页面换出到硬盘,也就是说不会占用物理内存
如果使用了二级分页,一级页表就可以覆盖整个 4GB 虚拟地址空间,但如果某个一级页表的页表项没有被用到,也就不需要创建这个页表项对应的二级页表了,即可以在需要时才创建二级页表。做个简单的计算,假设只有 20% 的一级页表项被用到了,那么页表占用的内存空间就只有 4KB(一级页表) + 20% * 4MB(二级页表)= 0.804MB,这对比单级页表的 4MB 是不是一个巨大的节约?
我们把二级分页再推广到多级页表,就会发现页表占用的内存空间更少了,这一切都要归功于对局部性原理的充分应用。 对于 64 位的系统,两级分页肯定不够了,就变成了四级目录,分别是: 全局页目录项 PGD(Page Global Directory); 上层页目录项 PUD(Page Upper Directory); 中间页目录项 PMD(Page Middle Directory); 页表项 PTE(Page Table Entry);
TLB
基于程序访问的局部性,把最常访问的几个页表项存储到访问速度更快的硬件,于是计算机科学家们,就在 CPU 芯片中,加入了一个专门存放程序最常访问的页表项的 Cache,这个 Cache 就是 TLB(Translation Lookaside Buffer) ,通常称为页表缓存、转址旁路缓存、快表等。
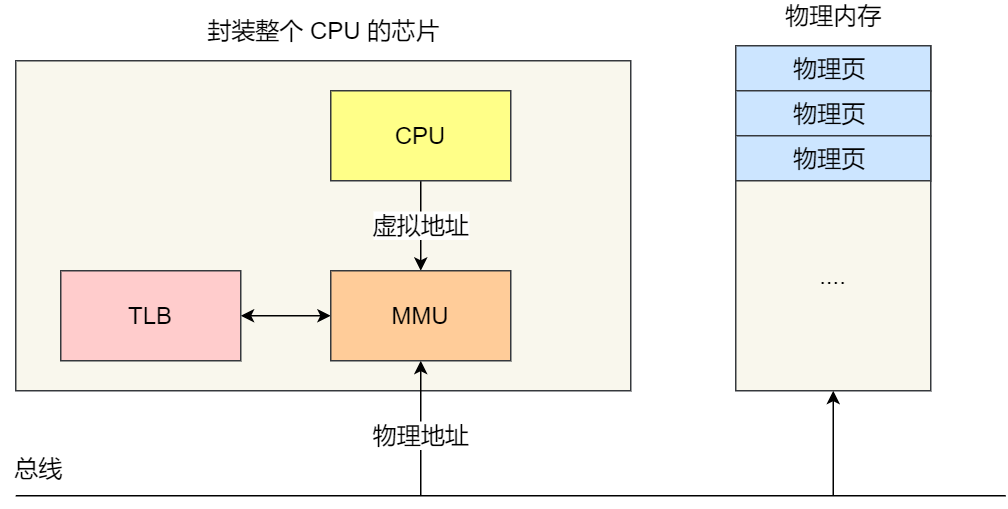
在 CPU 芯片里面,封装了内存管理单元(Memory Management Unit)芯片,它用来完成地址转换和 TLB 的访问与交互。 有了 TLB 后,那么 CPU 在寻址时,会先查 TLB,如果没找到,才会继续查常规的页表。 TLB 的命中率其实是很高的,因为程序最常访问的页就那么几个
段页式内存管理
先将程序划分为多个有逻辑意义的段,但每个段不再直接分配连续物理内存; 接着进一步把每个段划分为多个页,物理内存根据页进行分配,物理页框无需连续,可以分散在内存的任何位置
- 分段负责逻辑管理:保持模块化、共享和保护特性。
- 分页负责物理分配:将每段划分为固定大小的页,消除外部碎片,提高内存利用率。
这样,地址结构就由段号、段内页号和页内位移三部分组成。 用于段页式地址变换的数据结构是每一个程序一张段表,每个段又建立一张页表,段表中的地址是页表的起始地址,而页表中的地址则为某页的物理页号,如图所示:
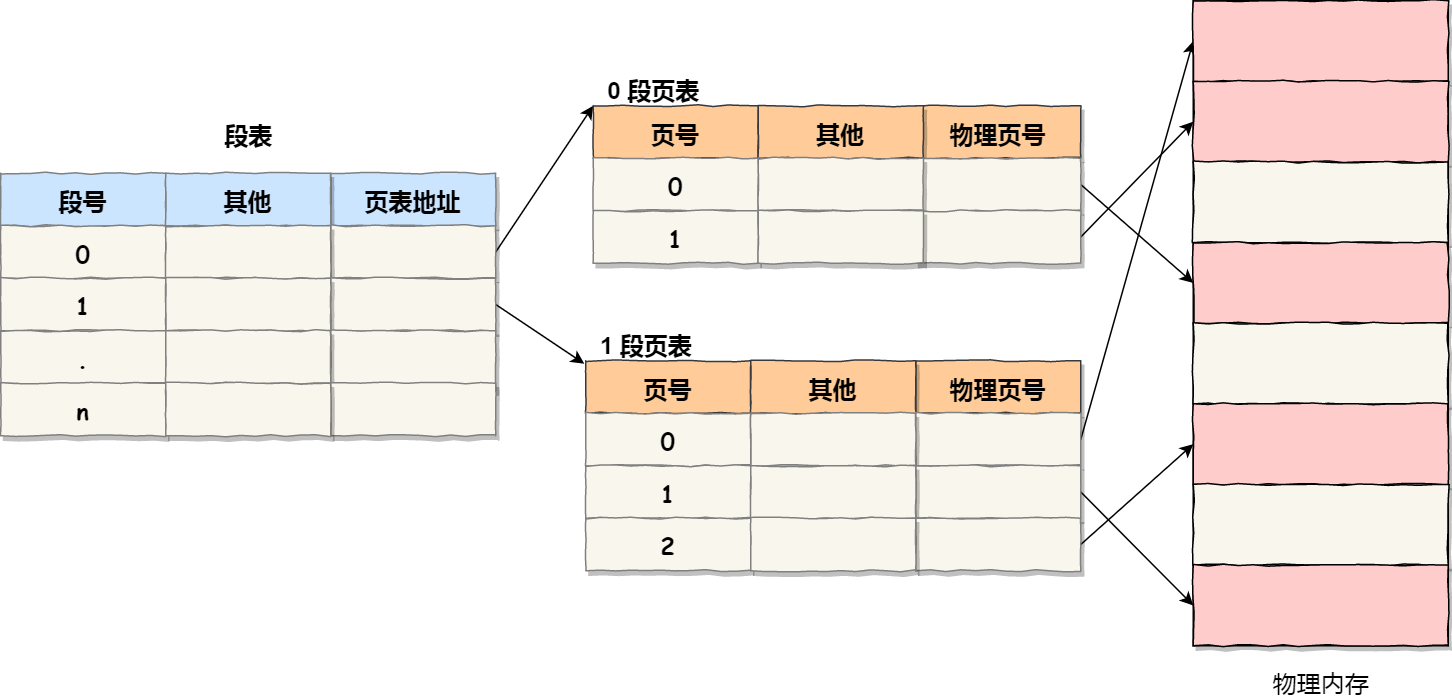
段页式地址变换中要得到物理地址须经过三次内存访问: 第一次访问段表,得到页表起始地址; 第二次访问页表,得到物理页号; 第三次将物理页号与页内位移组合,得到物理地址
| 方式 | 优点 | 缺点 |
|---|---|---|
| 纯分段 | 逻辑模块化,易于共享 | 外部碎片多,内存利用率低 |
| 纯分页 | 无外部碎片,内存利用率高 | 逻辑意义不直观,共享困难 |
| 段页式 | 结合两者优势 | 实现复杂,硬件开销大 |
传统LRU是如何管理数据的
当访问的页在内存里,就直接把该页对应的 LRU 链表节点移动到链表的头部。
当访问的页不在内存里,除了要把该页放入到 LRU 链表的头部,还要淘汰 LRU 链表末尾的页。
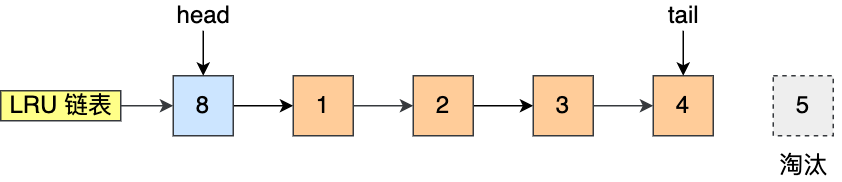
比如下图,假设 LRU 链表长度为 5,LRU 链表从左到右有编号为 1,2,3,4,5 的页。

如果访问了 3 号页,因为 3 号页已经在内存了,所以把 3 号页移动到链表头部即可,表示最近被访问了。

而如果接下来,访问了 8 号页,因为 8 号页不在内存里,且 LRU 链表长度为 5,所以必须要淘汰数据,以腾出内存空间来缓存 8 号页,于是就会淘汰末尾的 5 号页,然后再将 8 号页加入到头部。
传统的 LRU 算法并没有被 Linux 和 MySQL 使用,因为传统的 LRU 算法无法避免下面这两个问题: 预读失效导致缓存命中率下降; 缓存污染导致缓存命中率下降
预读失效
Linux 操作系统为基于 Page Cache 的读缓存机制提供预读机制
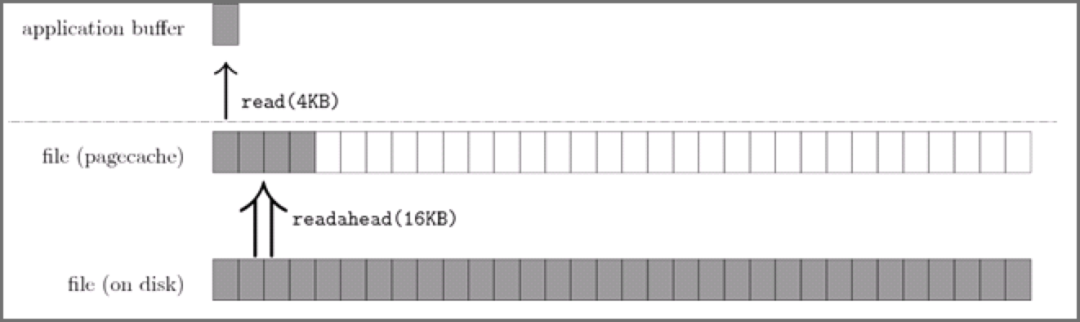
一个例子是: 应用程序只想读取磁盘上文件 A 的 offset 为 0-3KB 范围内的数据,由于磁盘的基本读写单位为 block(4KB),于是操作系统至少会读 0-4KB 的内容,这恰好可以在一个 page 中装下。
但是操作系统出于空间局部性原理(靠近当前被访问数据的数据,在未来很大概率会被访问到),会选择将磁盘块 offset [4KB,8KB)、[8KB,12KB) 以及 [12KB,16KB) 都加载到内存,于是额外在内存中申请了 3 个 page; 下图代表了操作系统的预读机制:
预读机制带来的好处就是减少了 磁盘 I/O 次数,提高系统磁盘 I/O 吞吐量。 MySQL Innodb 存储引擎的 Buffer Pool 也有类似的预读机制,MySQL 从磁盘加载页时,会提前把它相邻的页一并加载进来,目的是为了减少磁盘 IO。
如果这些被提前加载进来的页,并没有被访问,相当于这个预读工作是白做了,这个就是预读失效。 如果使用传统的 LRU 算法,就会把「预读页」放到 LRU 链表头部,而当内存空间不够的时候,还需要把末尾的页淘汰掉。 如果这些「预读页」如果一直不会被访问到,就会出现一个很奇怪的问题,不会被访问的预读页却占用了 LRU 链表前排的位置,而末尾淘汰的页,可能是热点数据,这样就大大降低了缓存命中率
预读失效解决方案
Linux 操作系统和 MySQL Innodb 通过改进传统 LRU 链表来避免预读失效带来的影响,具体的改进分别如下:
- Linux 操作系统实现两个了 LRU 链表:活跃 LRU 链表(active_list)和非活跃 LRU 链表(inactive_list);
- MySQL 的 Innodb 存储引擎是在一个 LRU 链表上划分来 2 个区域:young 区域 和 old 区域。
这两个改进方式,设计思想都是类似的,都是将数据分为了冷数据和热数据,然后分别进行 LRU 算法。不再像传统的 LRU 算法那样,所有数据都只用一个 LRU 算法管理。
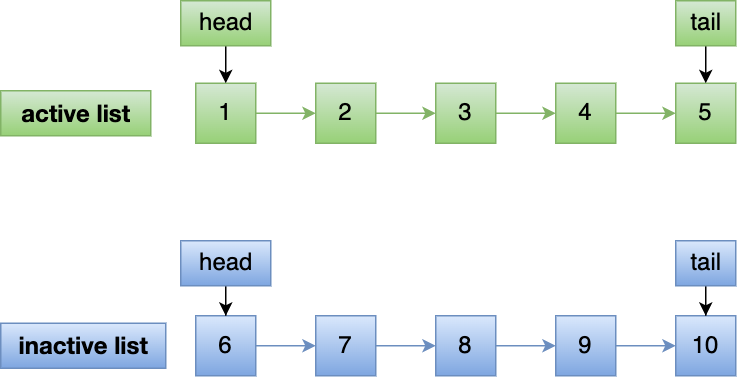
inux 操作系统实现两个了 LRU 链表:活跃 LRU 链表(active_list)和非活跃 LRU 链表(inactive_list)。 active list 活跃内存页链表,这里存放的是最近被访问过(活跃)的内存页; inactive list 不活跃内存页链表,这里存放的是很少被访问(非活跃)的内存页; 有了这两个 LRU 链表后,预读页就只需要加入到 inactive list 区域的头部,当页被真正访问的时候,才将页插入 active list 的头部。如果预读的页一直没有被访问,就会从 inactive list 移除,这样就不会影响 active list 中的热点数据。(active中淘汰数据会加入inactive的head,再淘汰inactive的tail)
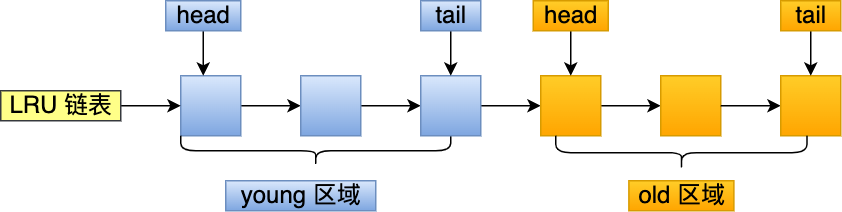
MySQL 的 Innodb 存储引擎是在一个 LRU 链表上划分来 2 个区域,young 区域 和 old 区域。 young 区域在 LRU 链表的前半部分,old 区域则是在后半部分,这两个区域都有各自的头和尾节点,如下图,young 区域与 old 区域在 LRU 链表中的占比关系并不是一比一的关系,而是 63:37(默认比例)的关系。 划分这两个区域后,预读的页就只需要加入到 old 区域的头部,当页被真正访问的时候,才将页插入 young 区域的头部。如果预读的页一直没有被访问,就会从 old 区域移除,这样就不会影响 young 区域中的热点数据。
缓存污染
当我们在批量读取数据的时候,由于数据被访问了一次,这些大量数据都会被加入到「活跃 LRU 链表」里,然后之前缓存在活跃 LRU 链表(或者 young 区域)里的热点数据全部都被淘汰了,如果这些大量的数据在很长一段时间都不会被访问的话,那么整个活跃 LRU 链表(或者 young 区域)就被污染了。
缓存污染带来的影响就是很致命的,等这些热数据又被再次访问的时候,由于缓存未命中,就会产生大量的磁盘 I/O,系统性能就会急剧下降。
缓存污染解决方案
前面的 LRU 算法只要数据被访问一次,就将数据加入活跃 LRU 链表(或者 young 区域),这种 LRU 算法进入活跃 LRU 链表的门槛太低了!正式因为门槛太低,才导致在发生缓存污染的时候,很容就将原本在活跃 LRU 链表里的热点数据淘汰了。 所以,只要我们提高进入到活跃 LRU 链表(或者 young 区域)的门槛,就能有效地保证活跃 LRU 链表(或者 young 区域)里的热点数据不会被轻易替换掉。
Linux 操作系统和 MySQL Innodb 存储引擎分别是这样提高门槛的:
- Linux 操作系统:在内存页被访问第二次的时候,才将页从 inactive list 升级到 active list 里。
- MySQL Innodb:在内存页被访问第二次的时候,并不会马上将该页从 old 区域升级到 young 区域,因为还要进行停留在 old 区域的时间判断:
- 如果第二次的访问时间与第一次访问的时间在 1 秒内(默认值),那么该页就不会被从 old 区域升级到 young 区域;
- 如果第二次的访问时间与第一次访问的时间超过 1 秒,那么该页就会从 old 区域升级到 young 区域;
提高了进入活跃 LRU 链表(或者 young 区域)的门槛后,就很好了避免缓存污染带来的影响。 在批量读取数据时候,如果这些大量数据只会被访问一次,那么它们就不会进入到活跃 LRU 链表(或者 young 区域),也就不会把热点数据淘汰,只会待在非活跃 LRU 链表(或者 old 区域)中,后续很快也会被淘汰。

